
What you are looking at is SpaceBok – a rover robot prototype that is being developed by a team of students from ETH Zurich and ZHAW Zurich. It is undergoing tests at ESA’s ESTEC technical center in the Netherlands and has been designed to travel in lunar gravity using controlled bounds into space with its legs leaving the ground.

The astronauts from Apollo 11 mission have already concluded that because of the low gravity of the Moon, it makes much more sense to hop around rather than walk. Project leader Hendrik Kolvenbach while discussing SpaceBok said, ‘Instead of static walking, where at least three legs stay on the ground at all times, dynamic walking allows for gaits with full flight phases during which all legs stay off the ground.

Animals make use of dynamic gaits due to their efficiency, but until recently, the computational power and algorithms required for control made it challenging to realize them on robots. For the lower gravity environments of the Moon, Mars or asteroids, jumping off the ground like this turns out to be a very efficient way to get around.
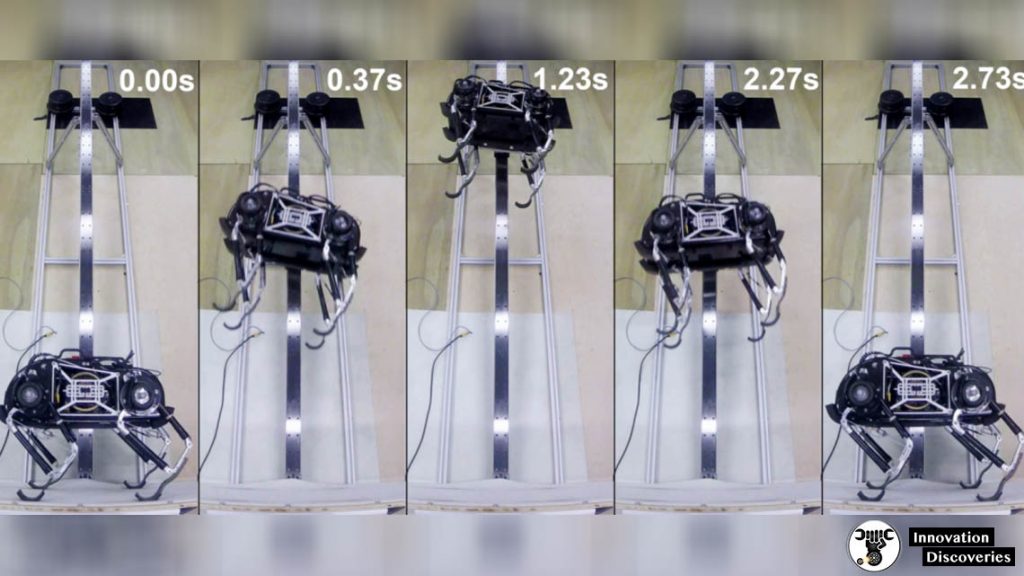
It also has a reaction wheel incorporated in its design that allows it to orient itself similar to how a satellite reorients itself. The team has been successful in making SpaceBok execute repetitive jumps attaining heights of up to 1.3 meters in lunar gravity simulation.
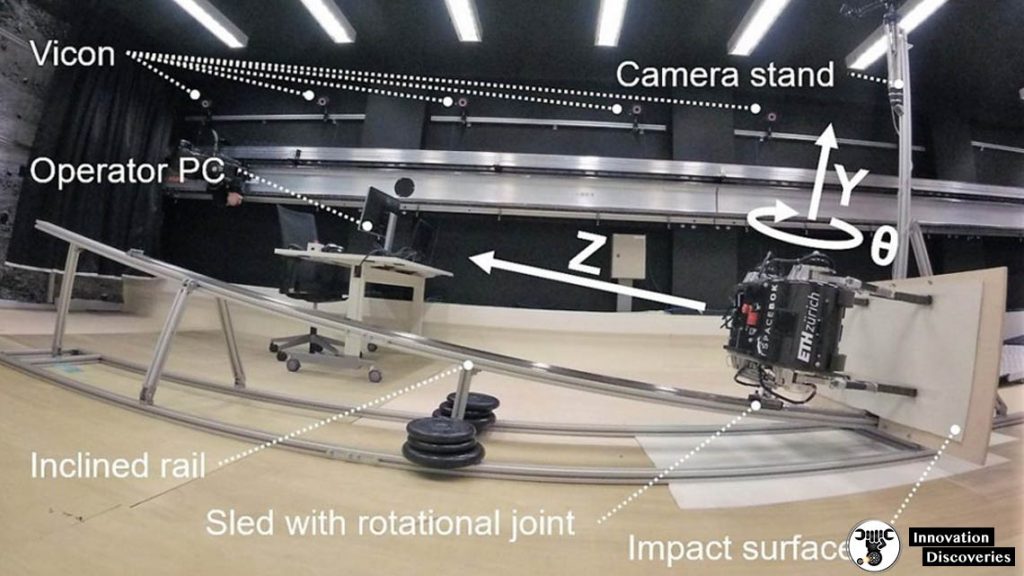
The team has conducted tests at ESA’s Orbital Robotics Bench for Integrated Technology at the Orbital Robotics and Guidance Navigation and Control Laboratory.



